确定工业机器人伺服电机电刷中性线的位置方法如下
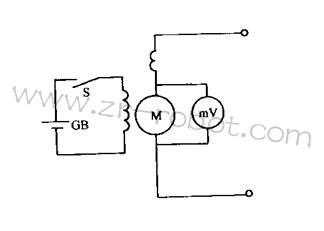
常用的是感应法,励磁绕组通过开关接到l.5~3V的直流电源上,毫伏表连接到相邻两组工业机器人伺服电机电刷上(工业机器人伺服电机电刷与换向器的接触一定要良好)。
当断开或闭合开关时(即交替接通和断开励磁绕组的电流),毫伏表的指针会左右摆动,这时将工业机器人伺服电机电刷架顺电动机转向或逆电动机转向缓慢移动,直到毫伏表指针几乎不动为止,此时刷架的位置就是中性线所在的位置。
图.7






手机扫一扫添加微信