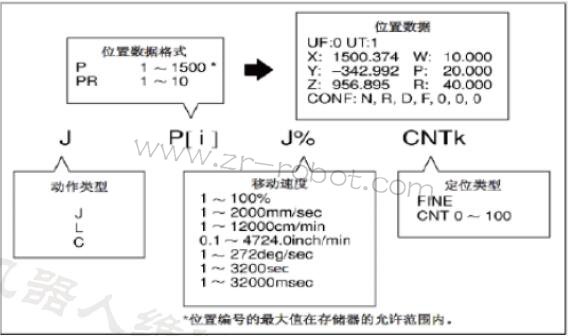
所谓动作指令, 是指以指令的移动速度和移动方法使机器人向作业空间内的指定位置移动的指令,动作指令中指定的内容如下。
○ 动作类型-指定向指定位置的轨迹控制。
○ 位置数据-对机器人将要移动的位置进行示教。
○ 移动速度-指定机器人的移动速度。
○ 定位类型-指定是否在指定位置定位。
○ 动作附加指令-指定在动作中执行附加指令。
动作指令
要进行动作指令的示教,按下F1~F5键,选择标准动作指令语句进行。
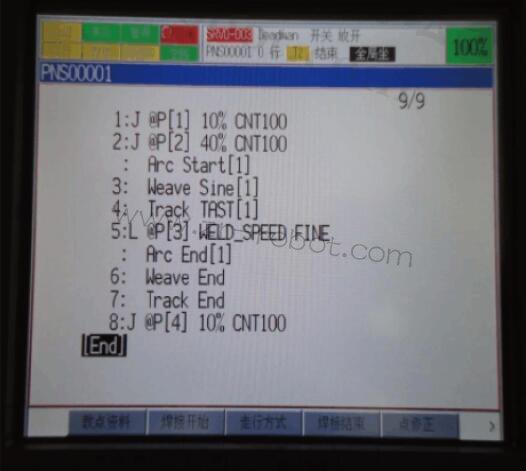
○ 按下F1“教点资料” (点)以进行动作指令的示教。
○ F5“点修正”(位置修改) ,用于对已经示教的位置数据进行再示教。
动作类型动作类型指定向指定位置的移动轨迹。动作类型有: 不进行轨迹控制、姿态控制的直线动作、以及圆弧动作。
○ 关节动作( J)
○ 直线动作(包含旋转移动) (L)
○ 圆弧动作( C)
关节动作
J
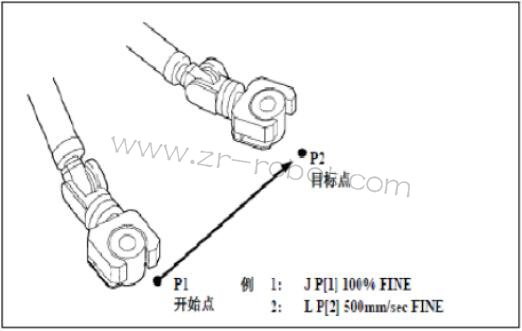
关节动作是将机器人移动到指定位置的基本的移动方法。机器人沿着所有的轴同时加速, 在示教速度移动后,同时减速后停止。移动轨迹通常为非线性。在对结束点进行示教时记述动作类型。关节移动的速度的指定,以相对最大移动速度的百分比来记述,移动的焊炬姿势不受控制。
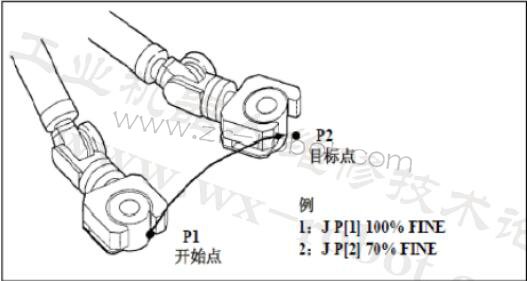
关节运动
直线动作
L直线动作是以线性方式对从动作点到结束点的枪尖点的移动轨迹进行控制的一种移动方法。在对结束点进行示教时记述动作类型。直线移动速度的指定,从mm/sec 、cm/min 、inch/min 、sec 中予以选择。将开始点和目标点的姿态进行分割后对移动中的焊枪姿势进行控制。
直线动作
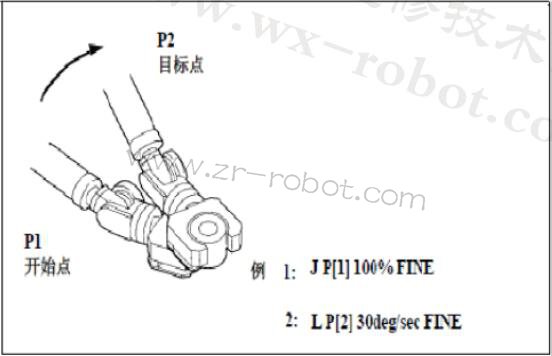
旋转动作是使用直线动作,使焊枪的姿势从开始点到结束点以枪尖点位中心旋转的一种方法。将开始点和目标点的姿势分割后对移动中的焊枪姿势进行控制。此时,移动速度以deg/sec 予以指定。移动轨迹(枪尖点移动的情况下)通过线性方式进行控制。
旋转动作
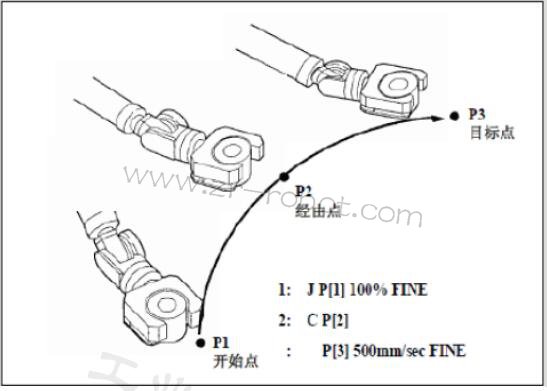
圆弧动作
C圆弧动作是从动作开始点通过经由点到结束点以圆弧的方式对焊枪尖点的移动轨迹进行控制的一种的方法。其在一个指令中对经由点和目标点进行示教。圆弧移动速度的指定,从mm/sec 、cm/min 、inch/min 、sec 中予以选择。将开始点、经由点、目标点的姿势进行分割后移动中的焊枪姿势进行控制。
圆弧动作