还需定期更换ABB装配机器人IRB1100伺服电机内部的零部件,如轴承、轮毂、压缩泵等,以预防因零部件老化而引...
2024-12-09
伺服电机过热,作为三协晶圆半导体机器人运行中常见的困扰,其成因颇为复杂,可能源于多方面的因素,诸如过...
2024-12-05
维修完成后,进行测试运行是验证修复效果的关键步骤。在测试过程中,需密切关注电机的转速、噪音、温度等参...
在进行以上检查和爱普生SCARA机器人维修时,需要根据具体的伺服系统和应用场景来选择合适的方法。定期监测...
2024-12-04
在进行故障检修时,由于新装的编码器没有连接头,而是采用直接焊接连接的方式,因此我们首先需要确认连接线...
2024-12-02
工作时间也是评估轴承是否需要更换的重要参考依据。根据伺服电机的使用频率、负载情况以及制造商提供的轴承...
2024-11-29
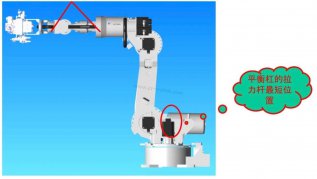
当伺服轴的运动超出了预设的位置允差范围时(以EA100出厂标准设置PA17:400为例,即位置超差检测范围为400)...
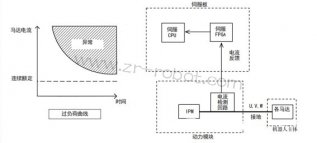
当动力模块反馈的电流强度超出了马达的额定连续电流范围,并且持续时间超过了预设的允许阈值时,系统会触发...
2024-11-28
先需要细致地观察机器人的运行状态。在这一过程中,务必全神贯注,留意任何异常声音的出现,这些声音可能尖...
在运转过程中,还需对轴承的滚动声、振动、润滑状态等关键指标进行检查。如,采用测声器对轴承的滚动声进行...
2024-11-25
在伺服电机的日常使用过程中,若未能遵循正确的操作方法或忽视了必要的维护保养,往往会引发一系列故障,这...
先检查电机是否过热。若电机温度正常,则需进一步检查连接电缆是否完好(重点检查控制柜处的航空插头是否插...
2024-11-23
手机扫一扫添加微信